Multiplex mc4000 Review

Introduction
The 4000 is Multiplex's top-of-the-range set, and is targeted at modelers who require ultimate flexibility. Typical applications include scale models, F3X gliders, jets etc.
Specifications
- PCM or PPM 7, 9, 12
- Power supply 6 Nicad cells, 3000 mAH NiMH
- Pulse width MPX (1.05-1.6-2.05 ms) or Universal (1.0 - 1.5 - 2.0 ms)
- Weight (inc. 1.7 Ah battery) approx. 53 oz.
- Dimensions 8.66" x 9.4" x 3.15"
- 4 line x 20 character LCD
Compatibility
The transmitter supports various transmission modes. PPM7 and PPM9 are compatible with most PPM receivers. PPM12 mode requires the use of a Multiplex 12 channel receiver.
Multiplex's proprietory PCM system is also supported, however MPX have stopped producing PCM receivers in favour of the newer PPM IPD units.
Case and Internals
The transmitter case is almost identical to the 3030. The main changes are a larger LCD, the "4000" logo, and the words "16-bit controller" under the LCD. There is also a second socket for a battery discharge resistor is on the right hand side of the case (more on that later). Sets manufactured since 2005 have a switch under the LCD to operate a backlight.
The inside of the case is dominated by a board with 12 sockets labeled A-M (except J, presumably because it could be confused with I). These are for the cables connecting the sticks, sliders and switches, providing the main flight controls.
A further 12 sockets are for switches for controlling flight modes, mixer input switching etc.
The switch assemblies use standard Hitec/JR servo connectors so it will be easy to make up your own.
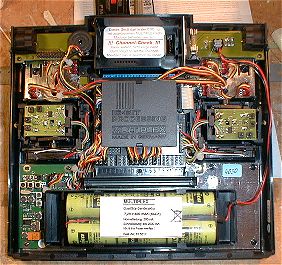
Scanner (not available for 72 MHz)
An optional scanner unit is available with a Channel Check function. At switch on, the system scans for another Tx on the same frequency and if it finds something, it blocks the Tx from radiating. This is a great safety feature, however you must remember to enter your frequency into the Channel menu whenever you change Xtals.
The scanner can also be used in a more conventional way. A histogram of the frequency band can be displayed, showing the signal strength on each channel. A 'memory' feature records channel usage for the last 10 minutes. This flexibility is approaching that of a dedicated scanner unit.
The transmitter crystal is accessed by first removing the back of the Tx case, then removing the RF module. A little cumbersome.
Battery
A 1800 mAh 6-cell pack was supplied on my unit. Following a full-charge, duration was 3 hours 45 minutes continuous running with the aerial fully extended. I have since fitted mine with Panasonic 3000 mAh NiMH batteries which are good for around 5-6 hours. I understand that the latest sets are supplied 3000 mAH NiMH batteries.
An alarm sounds when the battery reaches a threshold voltage. This voltage can be adjusted by the user via a menu.
The battery can also be discharged with the Tx switched off, by the use of a discharge resistor encased in a special DIN plug (supplied with the set). This fits into a socket on the right hand side of the case. The discharge process is activated via a system menu, with automatic termination at a predetermined voltage.
Software Architecture
Instead of the usual mile-long feature list, the 4000 presents you with a small set of basic facilities which - rather like Lego bricks - enable you to create powerful and elegant solutions.
Freely assignable functions and channels
The 4000 allows completely free assignment of flight controls. So any stick or switch can be used to control any function.
Channels numbers are also freely assignable, so you can emulate the numbering of your old R/C system, or you can assign all your functions into the top channels thus allowing the use of a micro receiver. Excellent for indoor flyers.
Flight Modes
Flight modes allow sets of certain parameters (e.g. control travel, aileron differential, dual rate, presets etc. ) to be switched during flight.
Up to five flight modes may be defined. Each mode is assigned a switch and a priority. If more than one flight mode is selected, the highest priority flight mode takes precedence.
Flight modes can be given easily remembered names and the currently active flight mode is displayed on the operating screen.
Flight mode switches are operated by any of the secondary switches. This means they can also be used to selectively activate or disable mixer inputs. This is incredibly useful, for example in a typical glider Landing mode you'll normally want to disable snapflap mixing
Trims
Trim levers have their own control codes TA,TB, TC and TD. It's possible to use assign them to functions just as with any other widget.
Virtual Switches
In addition to up to 12 physical switches, the system supports a useful set of "virtual" switches. These provide additional functionality:
- Transfer switches - these treat 3-position switches as if each switch position is a discrete on/off switch in its own right.
- Momentary switches - click on, click off.
- Control switches - on/off based on the position of a proportional control.
- Analogue switches - a proportional control attenuates (rather than simply activate/deactivate) a particular feature. This is a unique and very useful feature.
- Logical switches - create a switch based on AND / OR rules with other switches.
All physical and virtual switches can be specified equally in most of the programming screens.
Mixers and Curves
Mixers and curves are the heart of the mc4000's programming model. All mixer inputs are transformed using 3,5,7,9 or 13 point curves. By default, 3-point curves are used, the higher resolution curves come in useful when balancing up paired servos or for programming non-linear responses.
Some of the things you can cook up:
- Flap-elevator mixing so that flap never deflects more than a set amount
- Retractable u/c with sequenced doors operated by multiple servos.
If you find yourself repeating identical non-linear curves for different mixer inputs, you'll can abstract the curves into a multimix which act like black boxes and can be re-used.
For more information on mixers, see Using Mixers
Analogue Switches
Sometimes you want to attenuate (i.e. reduce the 'volume') of one function based on the position of a flight control. On gliders for example, it's often desirable to reduce the amount of aileron differential as spoiler is deployed. Or you may wish to reduce the amount of snapflap mixing as flap is applied.
Analogue switches are a general feature which allow you to do this kind of thing. They are incredibly useful for glider flyers, and seasoned power flyers will also find many uses for this facility.
More about Flight Modes
Flight modes allow you to switch between different control travels in flight, under the control of a switch. Used correctly, flight modes can minimise the mental load on the pilot, by reducing the number of switch operations needed during flight.
The program on my Nyx provides a good example of the flexibility offered by the mc4000's flight modes.
- A 3-position switch controls the main flight phases for Launch, Normal, and Landing
- Before the flight,
- I preselect F3F mode or Aerobatics mode for the 'Normal' flight phase (2-position switch)
- For 'F3F mode I preselect reflex or unreflexed (2-position switch)
To accomplish this, I created five flight modes for: Launch, Landing, Aerobatic, F3F/no-reflex, and F3F/reflex. By assigning them to three switches (one 3-position switch and two 2-position switches) and setting the relevant priorities, the flight modes can be cascaded from switch to switch exactly as described above.
The same switches which select flight modes can also enable and disable mixers. So in the above example, crow is enabled only in Landing mode, and snapflap is enabled in the F3F and Aerobatic modes.
You can also use the flight mode switch to toggle between different servo response curves. So you can have positive and negative snapflap in Aerobatic mode but only positive snapflap in F3F mode.
[Note for 3030 users - flight modes are not as flexible as switching between completely separate model memories. I have never found this to be an issue. The advantages of the mc4000 approach is that if you need to adjust a servo centre, it only needs to be done in one place, rather than in each 'switched' memory on the 3030]
Misc Software Features
A couple of other features which are worth mentioning:
- Control and Mixer "Slow"
- Controls can be "slowed" with different speeds in each direction. In addition individual mixer inputs can be "slowed" with different speeds in each direction. Control and Mixer Slow are additive.
- Timers
- Five programmable timers are provided. Timer 1 can resolve to 1/100th sec. Others to one second.
Documentation and Support
The 94-page English user manual is based on version 1 of the software, with an additional 15-page loose addendum for v2 of the software.
There are several misprints and mis-references, and some of the most powerful features including Servomix and Multimix are barely mentioned. There is no real attempt at showing the philosophy behind the system.
However, there is unofficial user-based support group for the 4000 on the internet - see Contacts. If you are completely new to Multiplex, read also my 3030 Pages, in particular the 3030 Guide.
PC Software
P4000 is an optional software package running under DOS which provides backup, Tx simulation and 3030 conversion facilities. A cable is supplied to connect the PC to the transmitter.
3030 - 4000 Conversion Program
The first thing which 3030 users will want to use is the conversion program. Unfortunately the documentation is poor. I also had problems getting it to run program on my main Win 98 PC - it crashed with a run-time error. However it ran okay on another PC.
Since the documentation is a bit lacking, I'll describe the process in more detail here. If you don't own a 3030 you can skip this section.
The first thing is to connect the 3030 Tx to the PC using the supplied cable, then read all the model memories from the 3030 and save them to a file with "D30" extension. Then re-open the file, and select one or more individual models for conversion. Use the space bar to tag each model. The converted data can either be sent directly to the mc4000 or saved to a CIF file which can be used later in the simulation program.
The conversion has a couple of restrictions - it doesn't handle 3030 user mixers, or helicopter mixers, and the built-in mixers are converted to servomix. Be that as it may, I managed to get all those carefully honed settings comfortably into their new home and the conversion for the Ellipse 2V was spot on.
P4000 Memory Backup Program
The P4000 backup software is reliable and is now available free. However, it was originally designed to work under the MSDOS operating system and requires a specially modified DOS emulator for to work under more modern Win32 OS's (e.g. Windows XP). See P4000 Dosbox for a free solution.
Tx Simulator
The Tx simulator is provides a complete simulation of the Tx functions on screen, complete with rotating servos. However in spite of its cleverness, I found it tricky to use and of limited application.
Conclusion
Let's get over the caveats first. First, the learning curve will vary from 'steep' to 'extremely steep', depending on your ability to program a computer. Sadly, the manual isn't always much help.
The bottom line is, if you don't have any basic computer programming experience, then the 4000 is not for you, period. Neither is the 4000 a good choice for simple applications like trainers or 2-servo wings. Finally, many pilots will find the size and shape a little unergonomic.
If you're still with me, then let me say that any niggles are dwarfed by the raw capabilities of this set. If you learn to program it elegantly, you'll be rewarded with a simpler flying experience compared with other radios, with fewer switches needed to control the different phases of flight. And once you understand how the 4000 works, you can throw the manual away because at its heart, because most of the features working in a generic way.
From a personal point, I've found the 4000 perfect for F3F. It is also built like a tank and has been trouble free for four years.
The mc4000 is a milestone system. I can't see many modelers outgrowing its flexibility. Multiplex themselves will be hard pressed to surpass the 4000, which is why if you have one, hold on to it for dear life, and if you need one, take my advice and get hold of one now.